Week 2 in Hertfordshire was spent trying to understand what is going on with linear and slow in and slow out motion. It also saw me looking at how I can integrate things better with other parts of ROS.
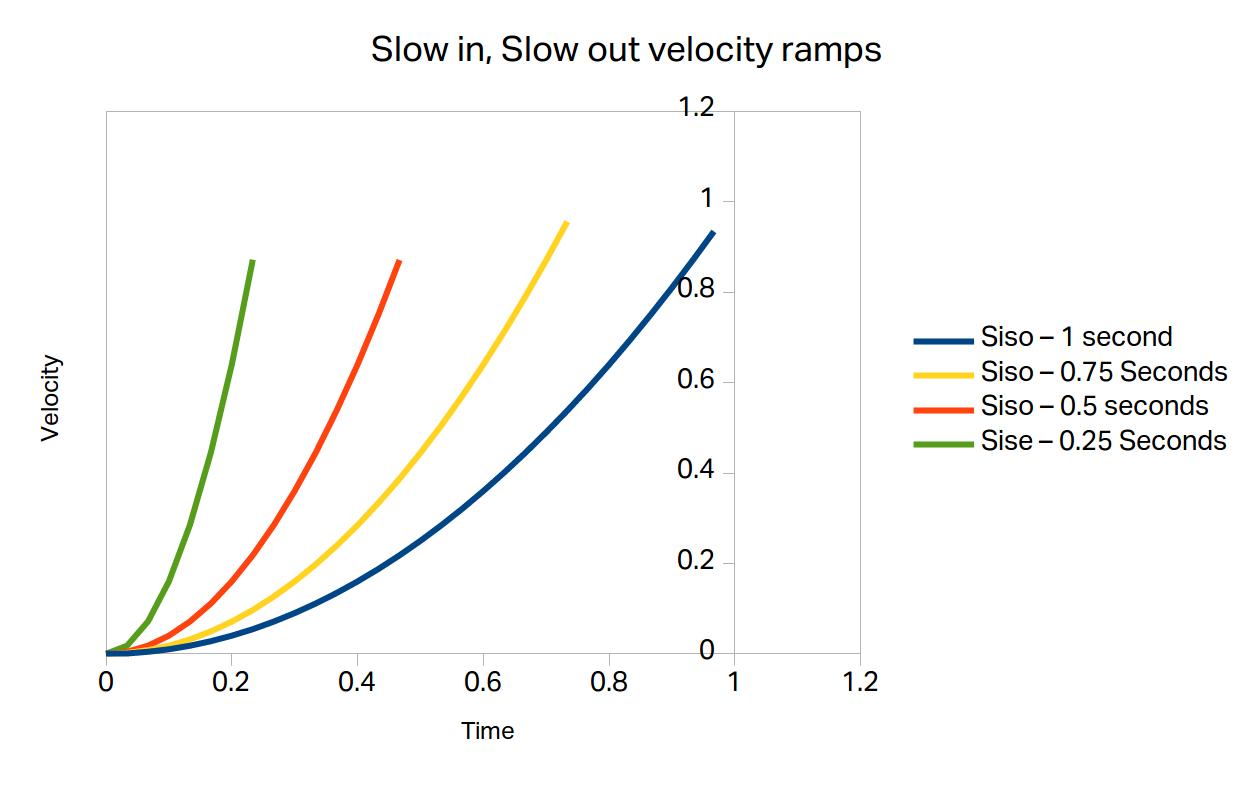
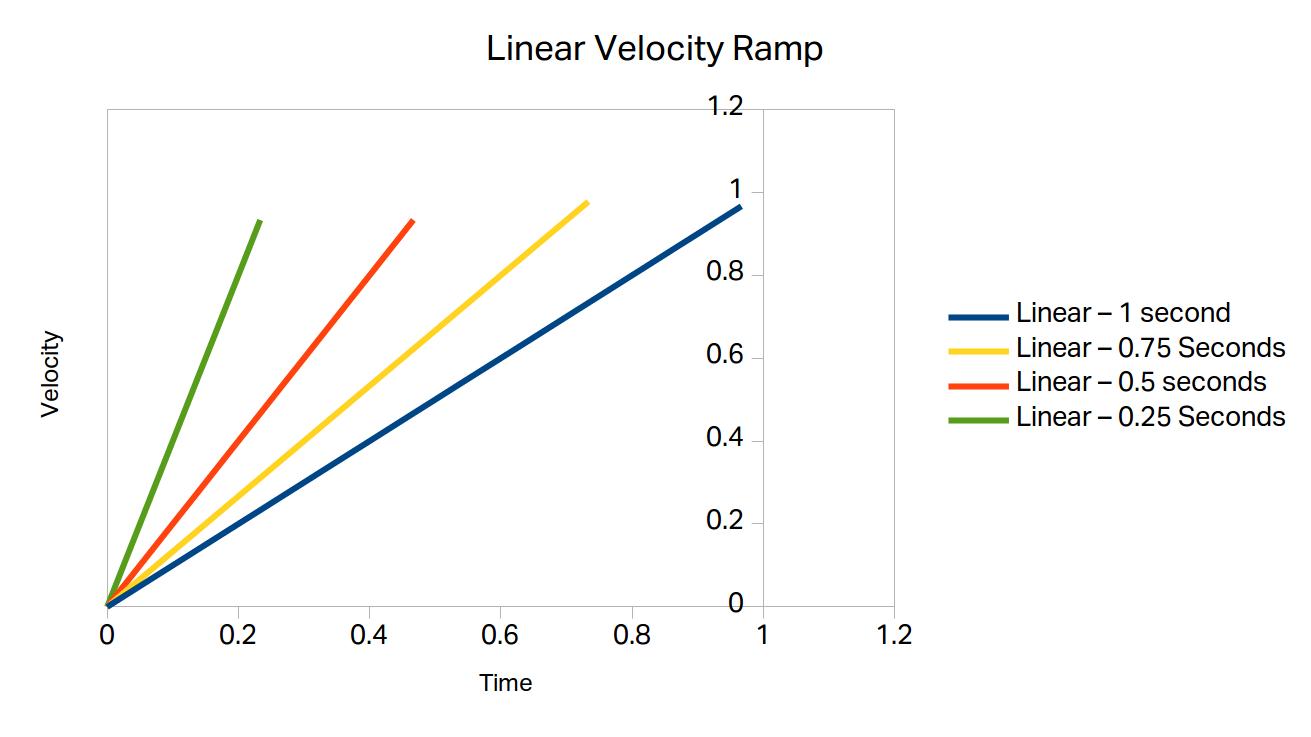
Monday was spent mostly looking at the difference between the linear movement and slow in, slow out movement ramps. This first involved fixing the linear movement to work correctly. Then, I turned to graphing the movement for both curves. I grabbed the velocity values from the simulator and graphed them against time. On the plus side, the graphs show what I was expecting.
The bigger surprise came with graphing velocity over distance a.k.a. the velocity profile that I mentioned in my papers:
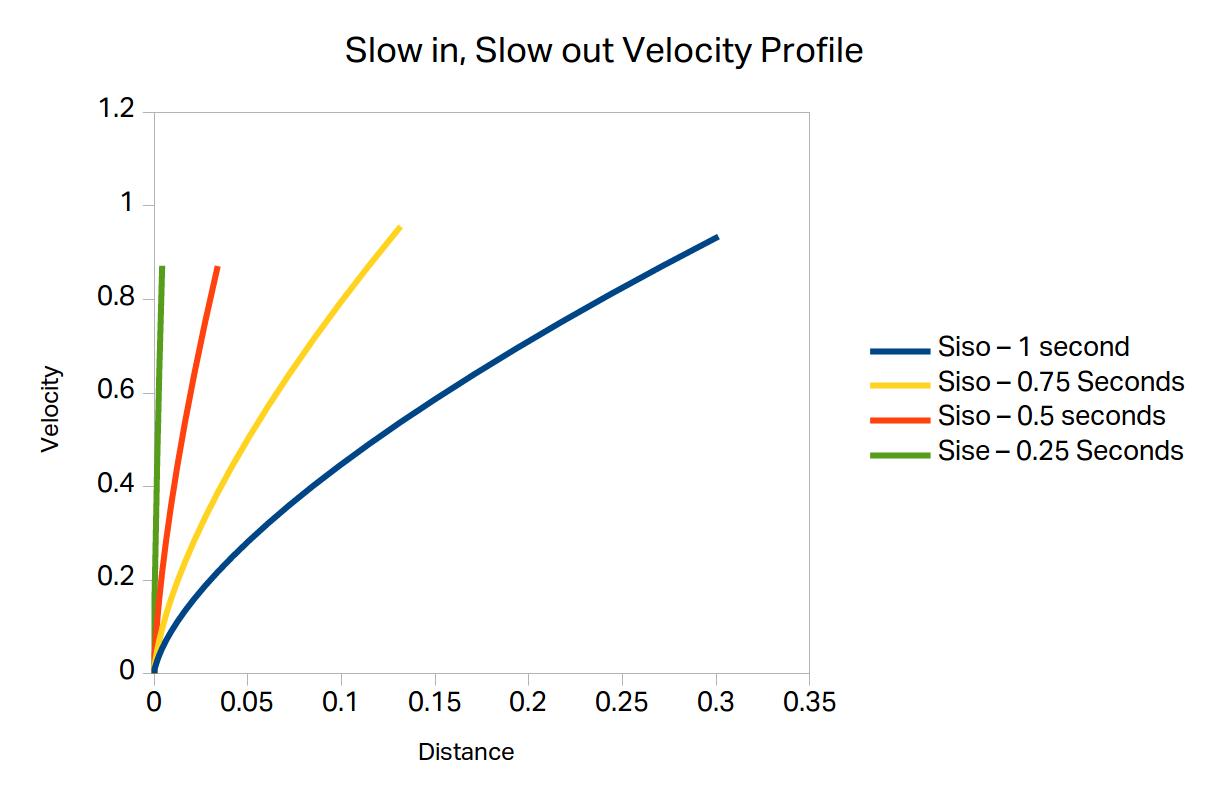
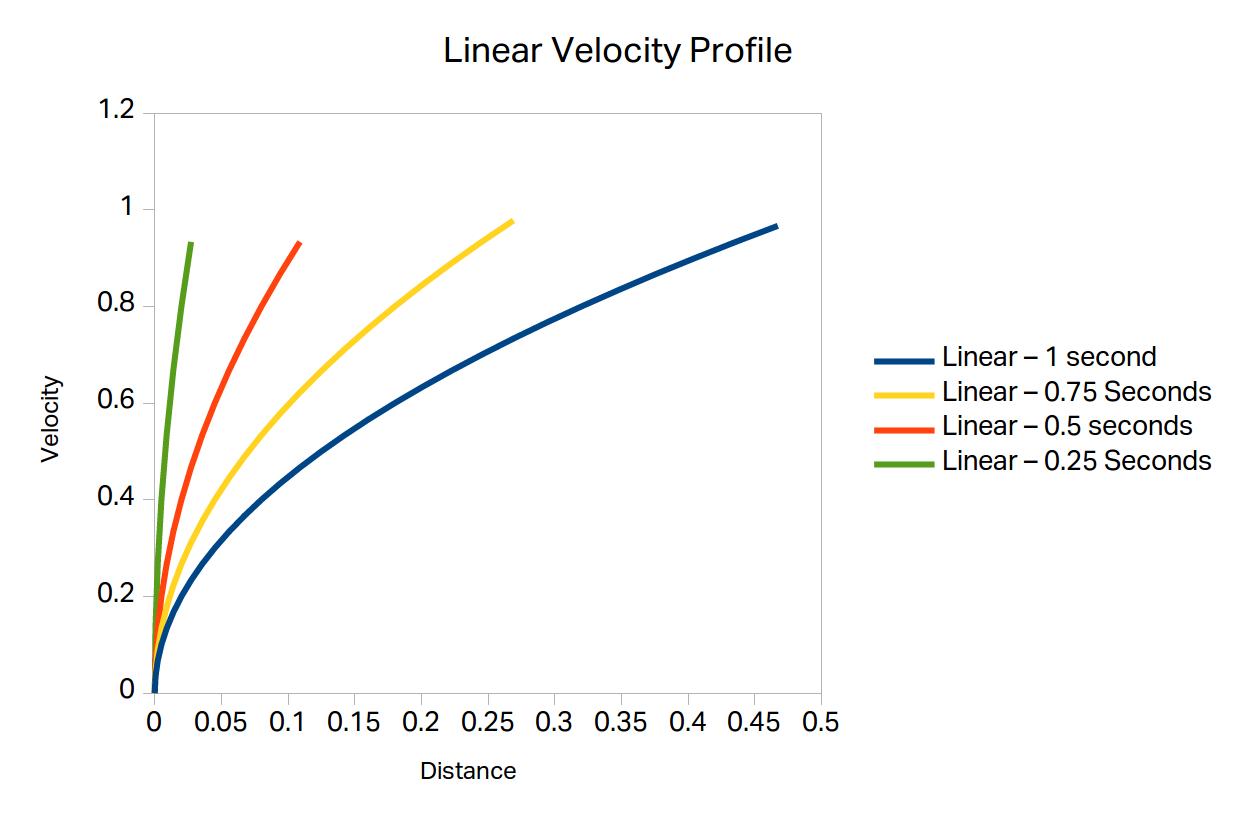
If you are closely reading my papers, you may notice what I’m talking about. The curve is well, curving inward, which was not what I was expecting. But the result is less surprising when I thought about it. Basically, it shows that the velocity profiles I’ve seen in a certain ROS programming book is very idealized. It’s something I’ll write about more in my dissertation.
But there were more than just making graphs. I also got to spend some time again at Robot House and run the different velocity ramps on Fetch. I took some videos in slow motion and some videos at regular speed. Looking at the footage on the phone, I felt that there was no difference, but after editing the videos down, I can see that there is a noticeable difference between the two. Here’s two videos. First, the linear motion:
Then, the slow in and slow out motion:
The rest of the week, I spent trying to understand the ROS navigation system. The idea was to see if the node that I had written could fit into the navigation system, the reason for that is that I can make use of other systems that are already available in that system (for example, localization and corrections that are done by the system). There’s a lot of stuff to examine here, and it took me time to wrap my head around everything. The upshot is that by the end of the week, I at least know where I need to adjust things (the local planner), and I can load my own custom version of it. I’ll have to examine and move fast on this next week and make a final decision for the evaluations in England. The plus side is that it should help with other works in MECS in Oslo.
Speaking of moving fast, I also need to finish up the Ethics application, and that means coming up with a full scenario. I have found possible ways to recruit, but to do that I need to get all the paperwork done and approved. If I can finish that next week too, I’ll be in pretty good shape.
Otherwise, I got to meet more of the staff and students in the adaptive systems group. They are a pretty good bunch.
To close out the post, I sighted a fox on my bike ride this morning! I’ll take it as a sign of good luck as a fox doesn’t cross my path every day. Here’s the (blurry) proof.
